
INTEGRATING CNN AND DICTIONARY MECHANISMS FOR EFFECTIVE LOOP CLOSURE DETECTION

Article Sidebar
-
SLAM, Loop Closure, Machine Learning, CNN, Dictionary
Abstract
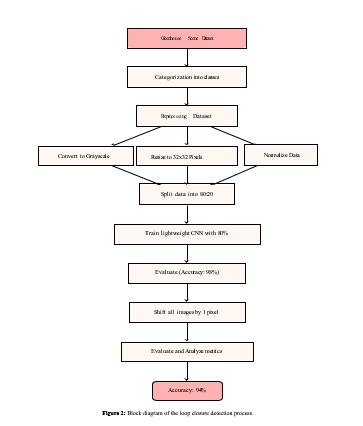
Loop closure detection (LCD) remains a critical challenge in visual Simultaneous Localization and Mapping (SLAM), particularly in environments with repetitive structures or sparse textures where traditional methods suffer from perceptual aliasing and computational inefficiency. This paper presents a robust and scalable LCD framework that integrates a lightweight Convolutional Neural Network (CNN) with a dictionary-based voting mechanism, optimized for accuracy and real-time performance in resource-constrained settings. The proposed CNN architecture, featuring a single convolutional layer with 32 filters, achieves 98% classification accuracy on the Greenhouse Scene Dataset-a structured agricultural environment. Complementing the CNN, a dynamic dictionary tracks class frequencies to detect loop closures via adaptive thresholding, eliminating the need for complex feature matching or geometric verification. Experimental results demonstrate real-time operation (0.076 seconds per 70 frames) and resilience to spatial distortions, maintaining 92% accuracy under pixel-level shifts. Compared to state-of-the-art methods, our approach reduces computational overhead and memory usage
Full text article
References
Arandjelovic, R. G. (2016). NetVLAD: CNN Architecture for Weakly Supervised Place Recognition. Retrieved from CVPR 2016 Open Access Repository: https://openaccess.thecvf.com/content_cvpr_2016/html/Arandjelovic_NetVLAD_CNN_Architecture_CVPR_2016_paper.html
Barros, A. M. (2022, February 10). A Comprehensive Survey of Visual SLAM Algorithms. Retrieved from MDPI: https://doi.org/10.3390/robotics11010024
Campos, C. E. (n.d.). ORB-SLAM3: An Accurate Open-Source Library for Visual, Visual–Inertial, and Multimap SLAM. Retrieved from IEEE Xplore: https://doi.org/10.1109/TRO.2021.3075644
Chen, Y. Z. (2022, July 21). Fast and robust loop-closure detection using deep neural networks and matrix transformation for a visual SLAM system. Retrieved from SPIE Digital Library: https://doi.org/10.1117/1.JEI.31.6.061816
Cummins, M. &. (2008, June 1). FAB-MAP: Probabilistic Localization and Mapping in the Space of Appearance. Retrieved from SAGE Journals: https://doi.org/10.1177/0278364908090961
Kim, J. J. (2021). SymbioLCD: Ensemble-Based Loop Closure Detection using CNN-Extracted Objects and Visual Bag-of-Words. Retrieved from IEEE Xplore: https://doi.org/10.1109/IROS51168.2021.9636622
Krizhevsky, A. S. (2017, May 24). ImageNet classification with deep convolutional neural networks. Retrieved from ACM Digital Library: https://doi.org/10.1145/3065386
Li, K. W. (2023). CoCALC: A Self-Supervised Visual Place Recognition Approach Combining Appearance and Geometric Information. Retrieved from IEEE Xplore: https://doi.org/10.1109/ACCESS.2023.3246803
Mehta, S. &. (2021, October 5). MobileViT: Light-weight, General-purpose, and Mobile-friendly Vision Transformer. Retrieved from arXiv: https://doi.org/10.48550/arXiv.2110.02178
Olid, D. F. (2018, August 20). Single-View Place Recognition under Seasonal Changes. Retrieved from arXiv: https://doi.org/10.48550/arXiv.1808.06516
Placed, J. A. (2023, March). A Survey on Active Simultaneous Localization and Mapping: State of the Art and New Frontiers. Retrieved from IEEE Xplore: https://doi.org/10.1109/TRO.2023.3248510
Qin, C. Z. (2021, April). Semantic loop closure detection based on graph matching in multi-objects scenes. Retrieved from ScienceDirect: https://doi.org/10.1016/j.jvcir.2021.103072
Shi, Y. L. (2024). A Robust and Lightweight Loop Closure Detection Approach for Challenging Environments. Retrieved from MDPI – Drones: https://doi.org/10.3390/drones8070322
Simonyan, K. &. (2024, September 4). Very Deep Convolutional Networks for Large-Scale Image Recognition. Retrieved from arXiv: https://doi.org/10.48550/arXiv.1409.1556
Soncini, N. C. (2024, August 12). Addressing the challenges of loop detection in agricultural environments. Retrieved from Wiley Online Library: https://doi.org/10.1002/rob.22414
Xiao, B. L. (n.d.). The greenhouse remote sensing image dataset. Retrieved from IEEE DataPort: https://dx.doi.org/10.21227/y6j3-fq20
Xu, B. Y. (2021, September 19). Loop Closure Detection for Visual SLAM Using Simplified Convolution Neural Network. Retrieved from SpringerLink: https://doi.org/10.1007/978-3-030-31967-0_6
Yu, C. L. (2019). A DenseNet feature-based loop closure method for visual SLAM system. Retrieved from IEEE Xplore: https://doi.org/10.1109/ROBIO49542.2019.8961714
Zhou, Y. &. (2025, March 4). A visual SLAM loop closure detection method based on lightweight siamese capsule network. Retrieved from Scientific Reports: https://doi.org/10.1038/s41598-025-90511-4
Authors
Copyright (c) 2025 Ayda Mohammed Sharif, Sadegh Abdollah Aminifar

This work is licensed under a Creative Commons Attribution 4.0 International License.
Authors who publish with this journal agree to the following terms:
- Authors retain copyright and grant the journal right of first publication with the work simultaneously licensed under a Creative Commons Attribution License [CC BY-NC-SA 4.0] that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this journal.
- Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the journal's published version of the work, with an acknowledgment of its initial publication in this journal.
- Authors are permitted and encouraged to post their work online.